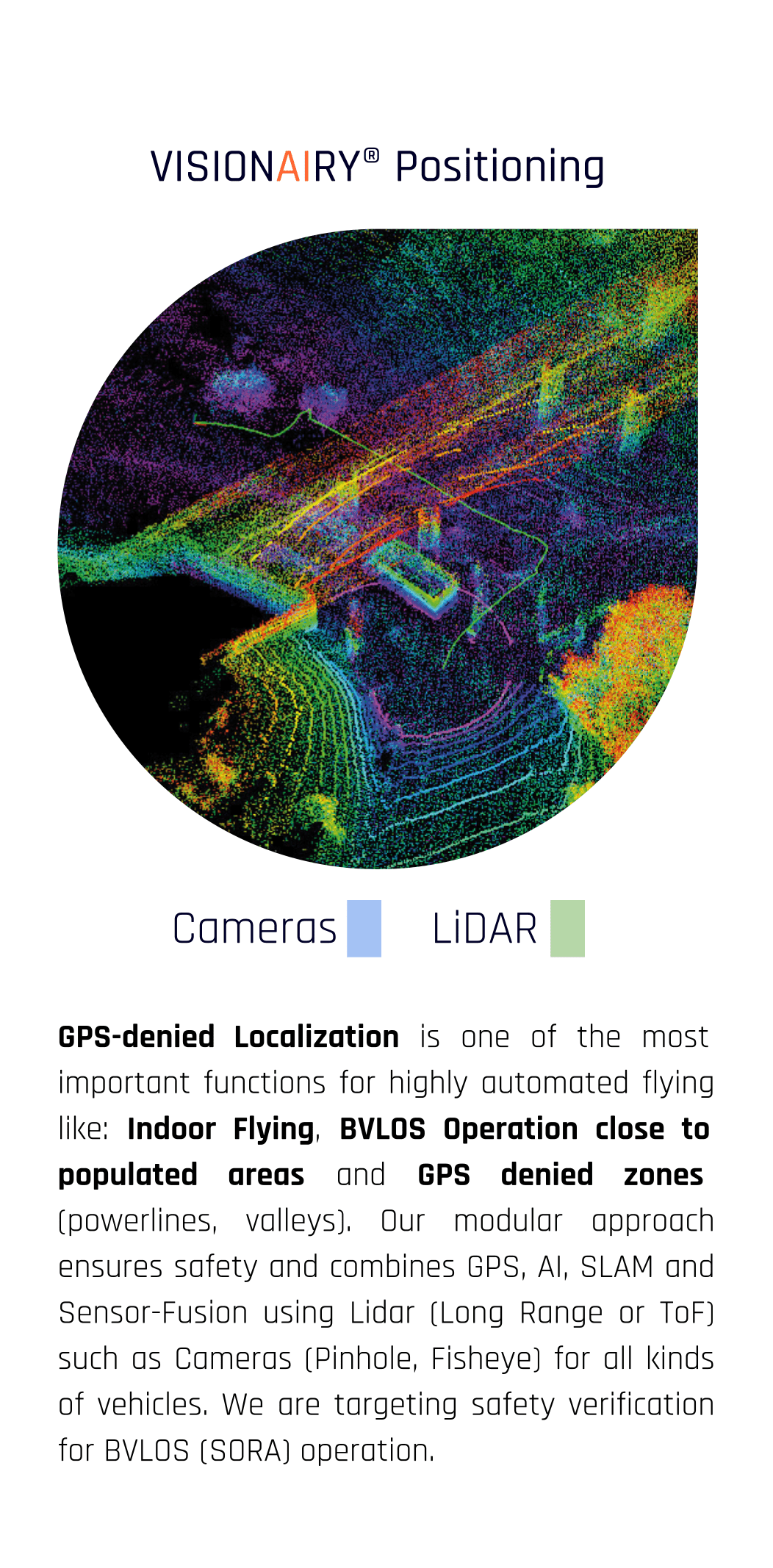
VISIONAIRY®
Positioning
Redundant Positioning for Indoor-, GPS-Denied- or
Populated Areas (made for BVLOS)
Features
Compatibility
Deployable on all Platforms: Auterion Skynode (no additional HW needed), PX4, Ardupilot, ROS, Linux
Best Performance
Highest "Performance / Weight" ratio on the market, while being highly accurate, running on several sensors and therefore being usable in Indoor or Outdoor-Scenarios
Safety
Designed as Sensor Based Visual Redundancy to GPS using Realtime capable SLAM technology on Depth or RGB
BVLOS in Populated Areas
Designed for highly automated systems (e.g. BVLOS) even in populated areas, where verification of positioning inevitable and necessary .