BEYOND VISUAL LINE OF SIGHT FLIGHTS WITH THE HELP OF AI

Detect & Avoid helicopter (sample image) Looking at the constantly growing drone market with more and more new manufacturers, fields of application and possible uses, the question of the safety […]
CVPR 2020: Spleenlab coorganizes the first WS for Omnidirectional Computer Vision

Our objective is to provide a venue for novel research in omnidirectional computer vision with an eye toward actualizing these ideas for commercial or societal benefit. As omnidirectional cameras become […]
Proceedings of the NeurIPS 2019 Competition and Demonstration Track: Catch Me, If You Can! A Mediated Perception Approach Towards Fully Autonomous Drone Racing
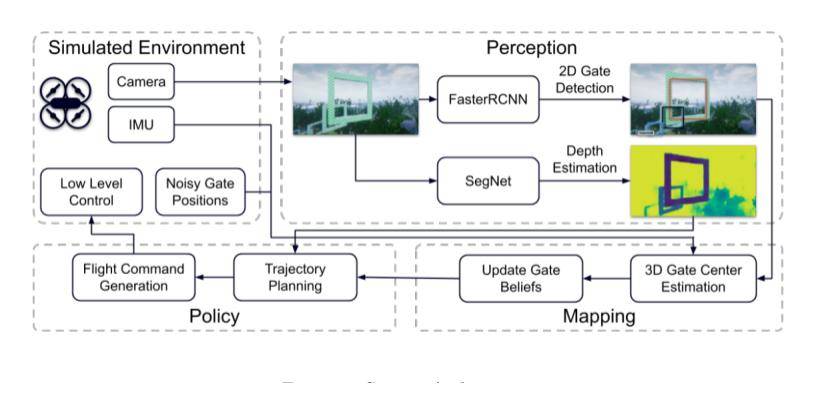
Florian Ölsner, Stefan Milz Abstract: Automated flight, e.g. first person view drone racing is a challenging task involving many sub-problems like monocular object detection, 3D pose estimation, mapping, optimal path […]
IROS 2020 – Main Conference: UnRectDepthNet: Self-Supervised Monocular Depth Estimation using a Generic Framework for Handling Common Camera Distortion Models
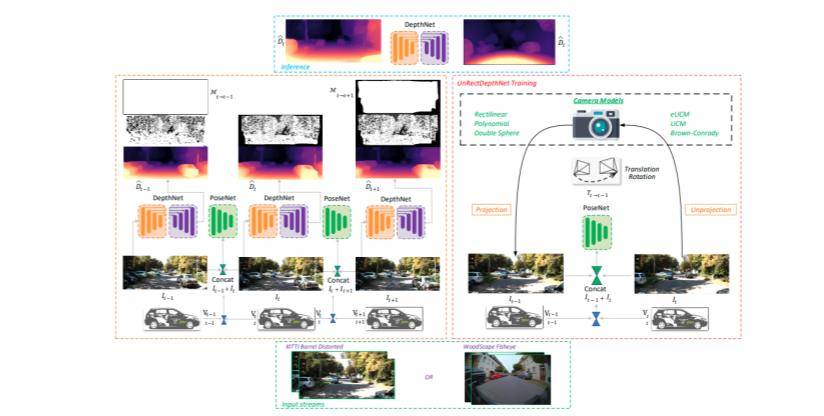
Varun Ravi Kumar, Senthil Yogamani, Markus Bach, Christian Witt, Stefan Milz, Patrick Mader Abstract: In classical computer vision, rectification is an integral part of multi-view depth estimation. It typically includes […]
NeuRIPS 2018 – WS on Machine Learning for Intelligent Transportation Systems: AI-Survey for Self-Flying Vehicles: Exploring the Challenges of Deep Learning
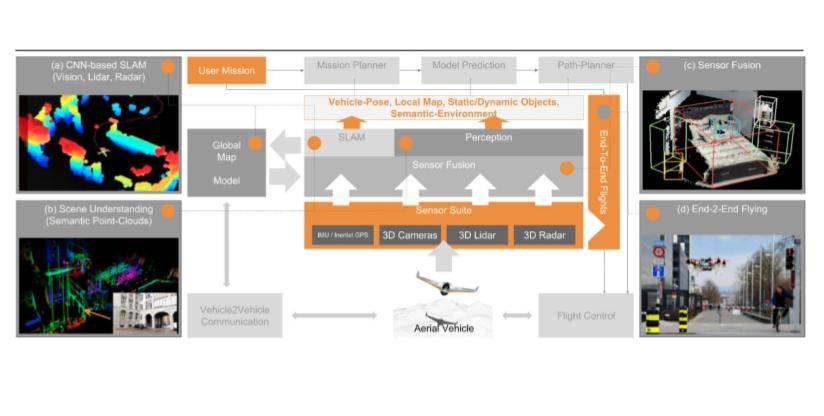
Stefan M., Sebastian Süss, Tobias Rüdiger, Florian Ölsner, Friedrich Möller, Mateusz Olichwer, Michal Uricar Abstract: Everyone is talking about intuitive and automated transportation. An important and very challenging part of […]
NeuRIPS 2018 – Machine Learning WS for Geophysical & Geochemical Signals: Aerial LiDAR reconstruction using conditional GANs (Poster)
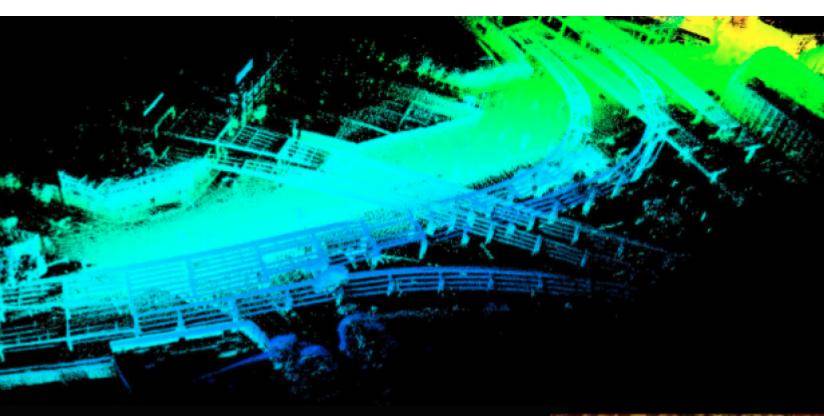
Stefan M., Sebastian Süss, Tobias Rüdiger, Florian Ölsner, Friedrich Möller, Mateusz Olichwer, B Ravi Kiran, Isabelle Leang, Senthil Yogamani Abstract: Recently, aerial LiDAR data opened lots of new opportunities for […]
ECCV 2018 – 2nd UAVision WS: Aerial GANeration: Towards Realistic Data Augmentation Using Conditional GANs
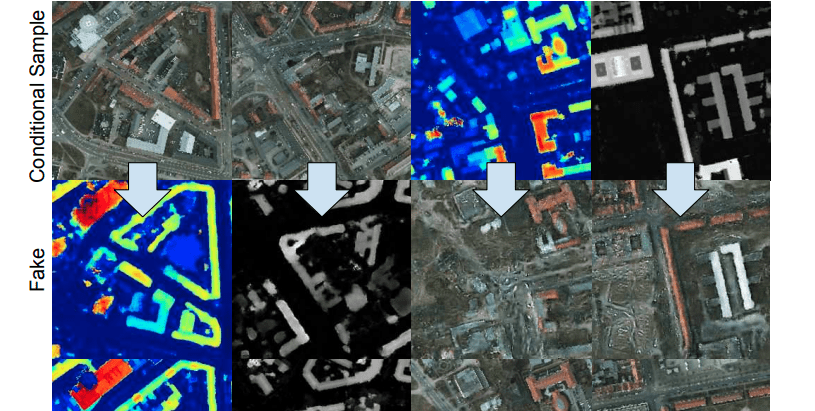
Stefan Milz, Tobias Rüdiger, Sebastian Süss Abstract Environmental perception for autonomous aerial vehicles is a rising field. Recent years have shown a strong increase of performance in terms of accuracy […]
ECCV 2018 – AutoNUE WS: Real-time Dynamic Object Detection for Autonomous Driving using Prior 3D-Maps
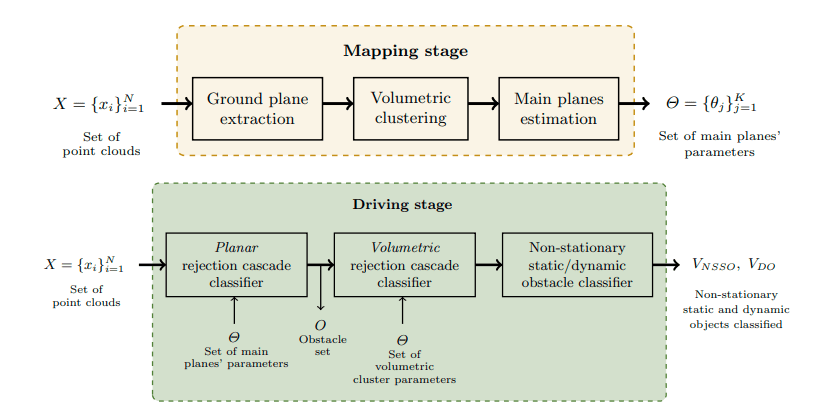
B Ravi Kiran, Luis Roldão, Benat Irastorza, Renzo Verastegui, Sebastian Suss, Senthil Yogamani, Victor Talpaert, Alexandre Lepoutre, Guillaume Trehard Abstract: Lidar has become an essential sensor for autonomous driving as […]