On the road at AERO and AUVSI XPONENTIAL

Finally, live trade fairs again and then two exciting events in one week. With the AERO in Friedrichshafen and the AUVSI XPOENTIAL in Orlando, there were two exciting trade shows […]
AUVSI XPONENTIAL & AERO FRIEDRICHSHAFEN
Next week (CW 17) is a great time to meet us and see our perception products live and simultaneously at two events: AUVSI — Association for Uncrewed Vehicle Systems International […]
ABOVE THE CLOUDS OF THURINGIA’S TECH METROPOLIS – OUR NEW LOCATION IN JENA

Conference room at the Spleenlab office in the Jentower in Jena-City. Jena is undoubtedly the heart of the Central German tech industry and one of the most up-and-coming cities in […]
FLYING? YOU BET! WITH OUR BRAND NEW VISIONAIRY PRODUCTS.
Only with safe and certifiable algorithms BVLOS flights will be possible on a large scale in the future. Something we at Spleenlab work for every day. All our products whether […]
CORONA CAN NOT SLOW DOWN OUR FLIGHT – OUR YEAR 2021

There is one topic that everyone has been talking about for the past year. Corona? Not at all. Much more exciting was the question of when and how drones and […]
New office above the clouds of Jena-City

Spleenlab wants to go high up, more precisely automated into the third dimension. For this reason there is no better place for our developers than the highest building in East […]
WACV 2022 – Main Conference: StickyLocalization: Robust End-To-End Relocalization on Point Clouds using Graph Neural Networks
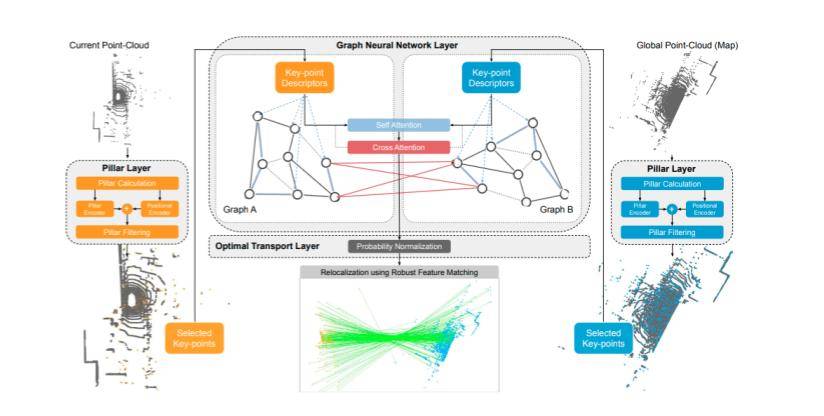
Kai Fischer, Martin Simon, Stefan Milz, Patrick Mader Abstract: Relocalization inside pre-built maps provides a big benefit in the course of today’s autonomous driving tasks where the map can be […]
CHANGE IN THE MANAGEMENT AT SPLEENLAB

Co-founder and Managing Director Sebastian Süß leaves the company and remains in an advisory role Spleenlab continues to grow successfully in various business areas Change to his association goals connect […]
ITSC 2021 – Main Conference: BEVDetNet: Bird’s Eye View LiDAR Point Cloud based Real-time 3D Object Detection for Autonomous Driving
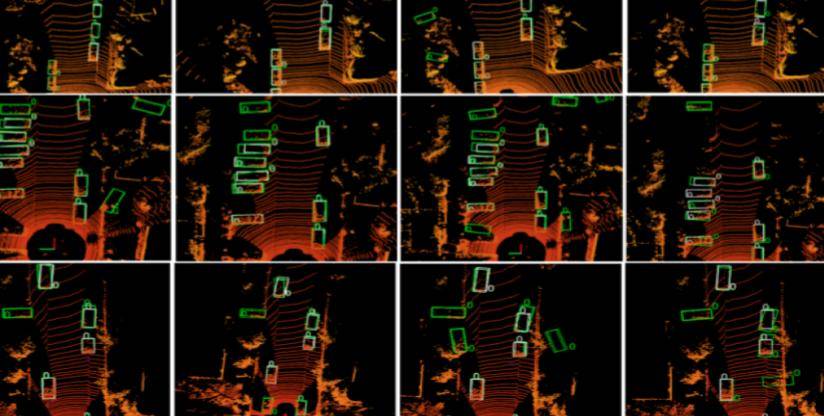
Sambit Mohapatra, Senthil Yogamani, Heinrich Gotzig, Stefan Milz, Patrick Mader Abstract: 3D object detection based on LiDAR point clouds is a crucial module in autonomous driving particularly for long range […]
CVPR 2021 – Spleenlab coorganizes Safety Workshop
Together with well known partners in the Automotiv Industry Spleenlab coorganizes Safety Workshop. Motivation Autonomously driving vehicles will undoubtedly change the world. The realization of these changes is a huge […]