WACV 2022 – Main Conference: StickyLocalization: Robust End-To-End Relocalization on Point Clouds using Graph Neural Networks
Kai Fischer, Martin Simon, Stefan Milz, Patrick Mader Abstract: Relocalization inside pre-built maps provides a big benefit in the course of today’s autonomous driving tasks where the map can be […]
ITSC 2021 – Main Conference: BEVDetNet: Bird’s Eye View LiDAR Point Cloud based Real-time 3D Object Detection for Autonomous Driving
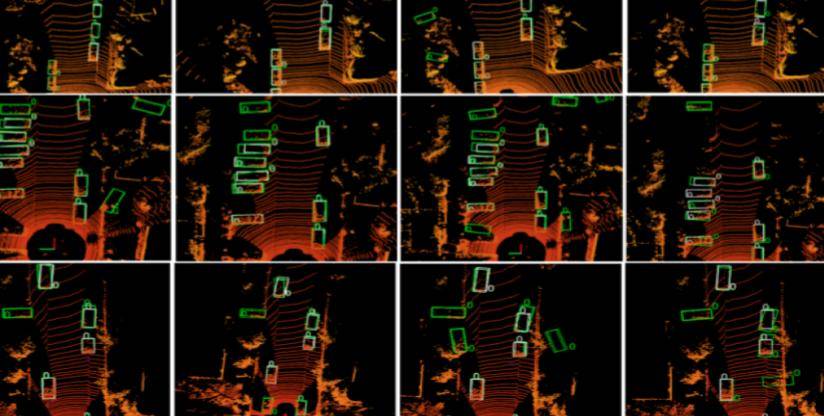
Sambit Mohapatra, Senthil Yogamani, Heinrich Gotzig, Stefan Milz, Patrick Mader Abstract: 3D object detection based on LiDAR point clouds is a crucial module in autonomous driving particularly for long range […]
CVPR 2021 – Spleenlab coorganizes Safety Workshop
Together with well known partners in the Automotiv Industry Spleenlab coorganizes Safety Workshop. Motivation Autonomously driving vehicles will undoubtedly change the world. The realization of these changes is a huge […]
CVPR 2021: Spleenlab coorganizes the 2nd WS for Omnidirectional Computer Vision
Motivation From immersive experiences to autonomous driving to medical imaging and more, we are increasingly seeing that maximizing a camera’s field of view can solve real-world problems. In the past […]
CVPR 2021 – WS on Safe Artificial Intelligence for Automated Driving: Development Methodologies for Safety Critical Machine Learning Applications in the Automotive Domain: A Survey
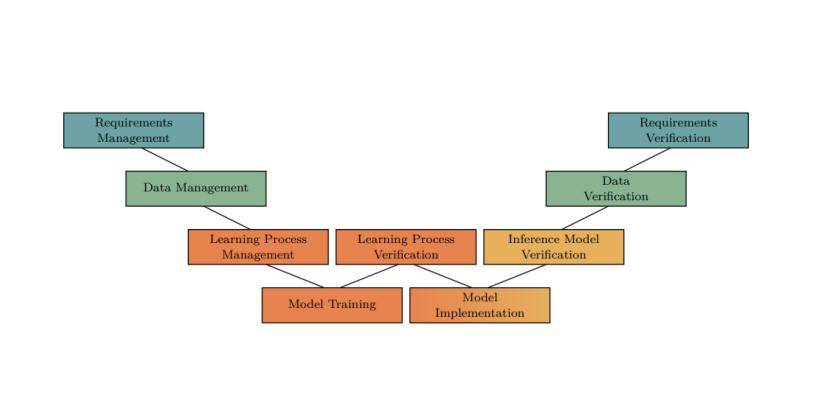
Martin Rabe, Stefan Milz, Patrick Mäder Abstract: Enabled by recent advances in the field of machine learning, the automotive industry pushes towards automated driving. The development of traditional safety-critical automotive […]
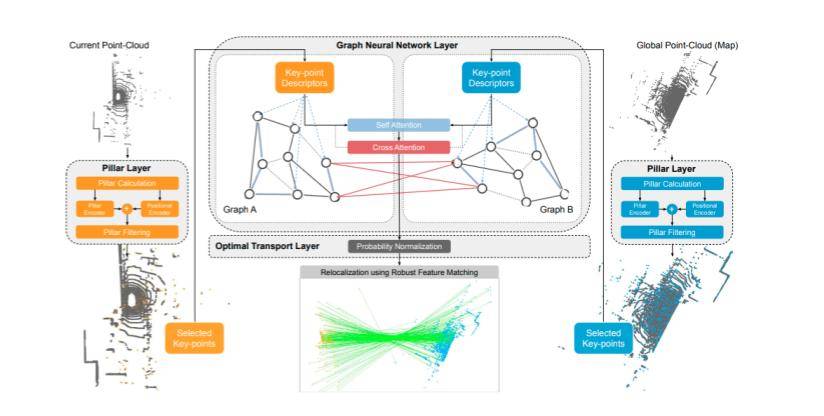
CVPR 2021 – Main Conference: StickyPillars: Robust and Efficient Feature Matching on Point Clouds using Graph Neural Networks
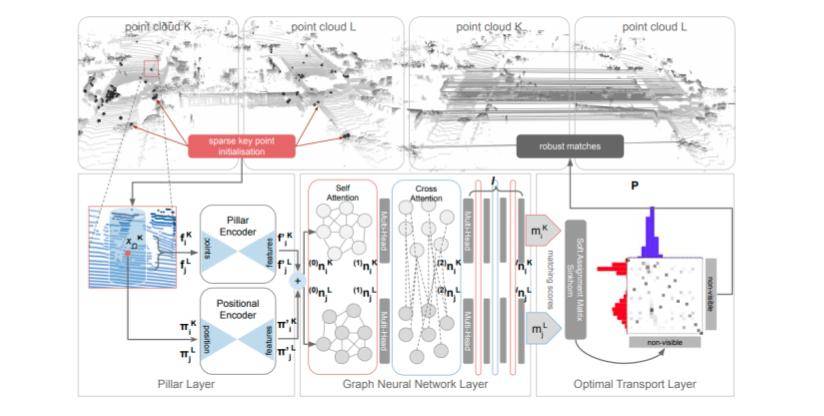
Kai Fischer, Martin Simon, Florian Olsner, Stefan Milz, Horst-Michael Groß, Patrick Mäder Abstract Robust point cloud registration in real-time is an important prerequisite for many mapping and localization algorithms. Traditional […]
CVPR 2020: Spleenlab coorganizes the first WS for Omnidirectional Computer Vision

Our objective is to provide a venue for novel research in omnidirectional computer vision with an eye toward actualizing these ideas for commercial or societal benefit. As omnidirectional cameras become […]
Proceedings of the NeurIPS 2019 Competition and Demonstration Track: Catch Me, If You Can! A Mediated Perception Approach Towards Fully Autonomous Drone Racing
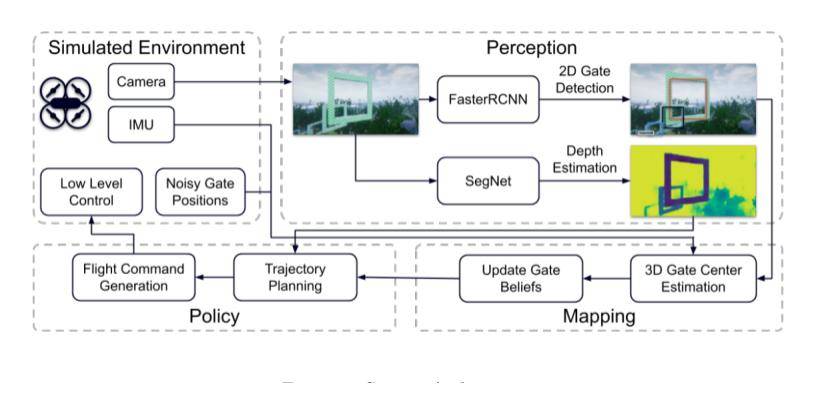
Florian Ölsner, Stefan Milz Abstract: Automated flight, e.g. first person view drone racing is a challenging task involving many sub-problems like monocular object detection, 3D pose estimation, mapping, optimal path […]
IROS 2020 – Main Conference: UnRectDepthNet: Self-Supervised Monocular Depth Estimation using a Generic Framework for Handling Common Camera Distortion Models
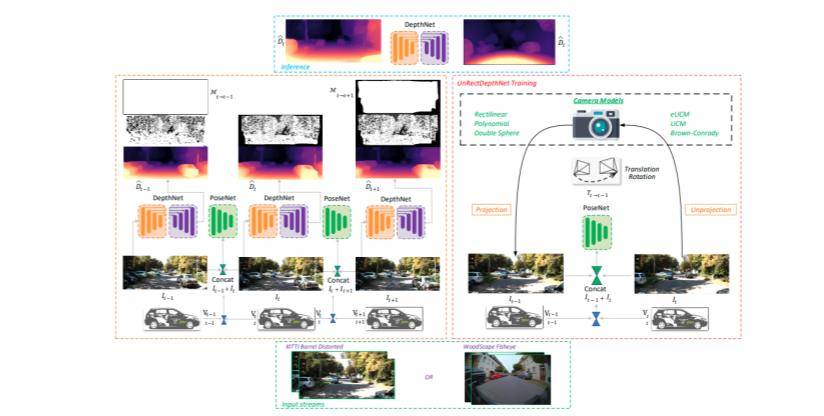
Varun Ravi Kumar, Senthil Yogamani, Markus Bach, Christian Witt, Stefan Milz, Patrick Mader Abstract: In classical computer vision, rectification is an integral part of multi-view depth estimation. It typically includes […]
NeuRIPS 2018 – WS on Machine Learning for Intelligent Transportation Systems: AI-Survey for Self-Flying Vehicles: Exploring the Challenges of Deep Learning
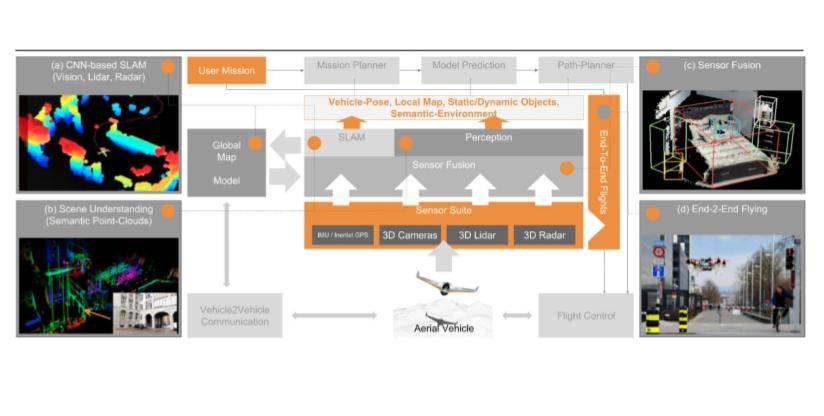
Stefan M., Sebastian Süss, Tobias Rüdiger, Florian Ölsner, Friedrich Möller, Mateusz Olichwer, Michal Uricar Abstract: Everyone is talking about intuitive and automated transportation. An important and very challenging part of […]